
在讨论分布式系统时,共识算法(Consensus algorithm)和一致性(Consistency)通常是讨论热点,两者的联系很微妙,很容易搞混。一些常见的误解:使用了 Raft [0] 或者 paxos 的系统都是线性一致的(Linearizability [1],即强一致),其实不然,共识算法只能提供基础,要实现线性一致还需要在算法之上做出更多的努力。以 TiKV 为例,它的共识算法是 Raft,在 Raft 的保证下,TiKV 提供了满足线性一致性的服务。
本篇文章会讨论一下线性一致性和 Raft,以及 TiKV 针对前者的一些优化。
线性一致性
什么是一致性,简单的来说就是评判一个并发系统正确与否的标准。线性一致性是其中一种,CAP [2] 中的 C 一般就指它。什么是线性一致性,或者说怎样才能达到线性一致?在回答这个问题之前先了解一些背景知识。
背景知识
为了回答上面的问题,我们需要一种表示方法描述分布式系统的行为。分布式系统可以抽象成几个部分:
- Client
- Server
- Events
- Invocation
- Response
- Operations
- Read
- Write
一个分布式系统通常有两种角色,Client 和 Server。Client 通过发起请求来获取 Server 的服务。一次完整请求由两个事件组成,Invocation(以下简称 Inv)和 Response(以下简称 Resp)。一个请求中包含一个 Operation,有两种类型 Read 和 Write,最终会在 Server 上执行。
说了一堆不明所以的概念,现在来看如何用这些表示分布式系统的行为。
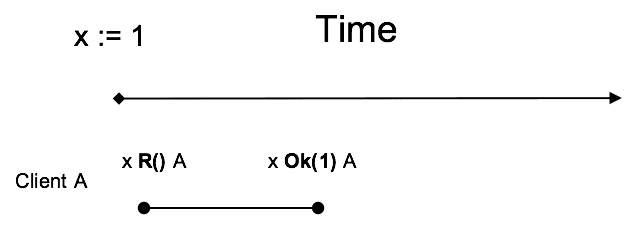
上图展示了 Client A 的一个请求从发起到结束的过程。变量 x 的初始值是 1,“x R() A” 是一个事件 Inv 意思是 A 发起了读请求,相应的 “x OK(1) A” 就是事件 Resp,意思是 A 读到了 x 且值为 1,Server 执行读操作(Operation)。
如何达到线性一致
背景知识介绍完了,怎样才能达到线性一致?这就要求 Server 在执行 Operations 时需要满足以下三点:
-
瞬间完成(或者原子性)
-
发生在 Inv 和 Resp 两个事件之间
-
反映出“最新”的值
下面我举一个例子,用以解释上面三点。
例:
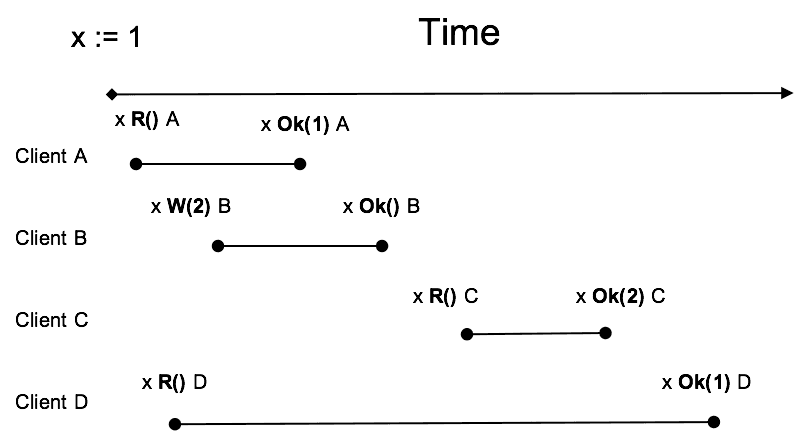
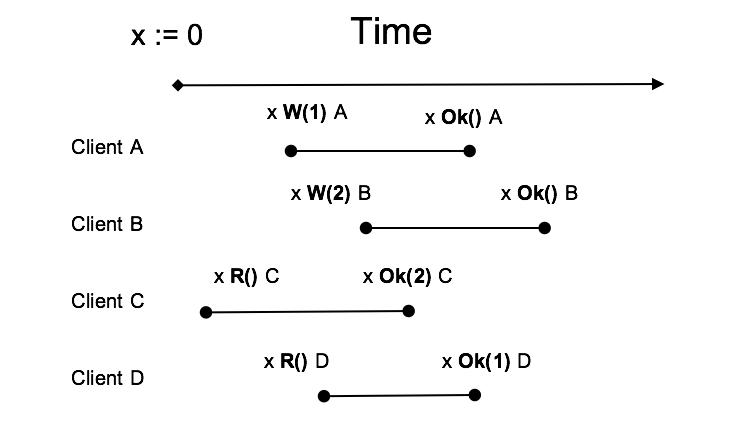
先下结论,上图表示的行为满足线性一致。
对于同一个对象 x,其初始值为 1,客户端 ABCD 并发地进行了请求,按照真实时间(real-time)顺序,各个事件的发生顺序如上图所示。对于任意一次请求都需要一段时间才能完成,例如 A,“x R() A” 到 “x Ok(1) A” 之间的那条线段就代表那次请求花费的时间,而请求中的读操作在 Server 上的执行时间是很短的,相对于整个请求可以认为瞬间,读操作表示为点,并且在该线段上。线性一致性中没有规定读操作发生的时刻,也就说该点可以在线段上的任意位置,可以在中点,也可以在最后,当然在最开始也无妨。
第一点和第二点解释的差不多了,下面说第三点。
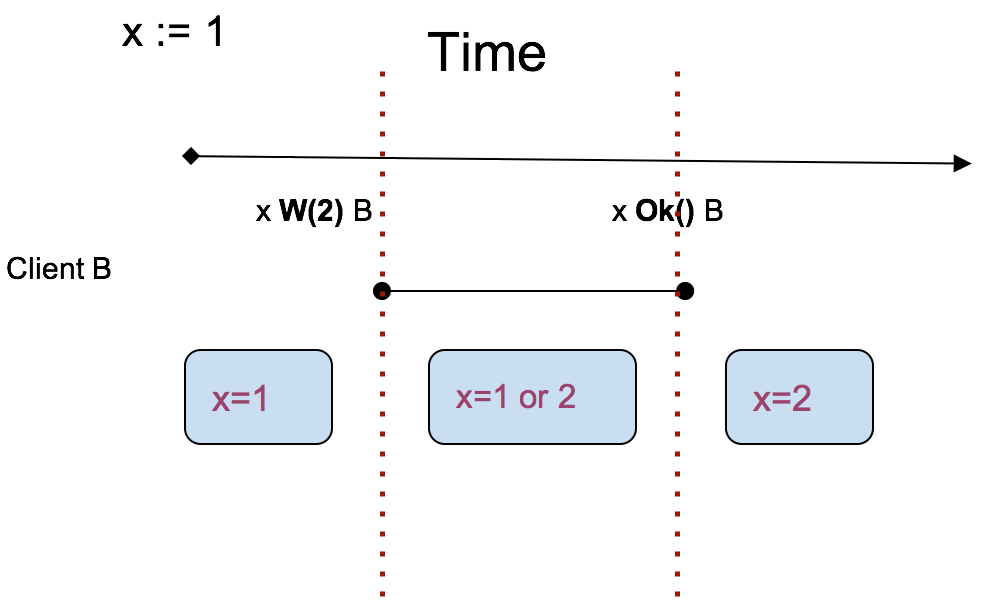
反映出“最新”的值?我觉得三点中最难理解就是它了。先不急于对“最新”下定义,来看看上图中 x 所有可能的值,显然只有 1 和 2。四个次请求中只有 B 进行了写请求,改变了 x 的值,我们从 B 着手分析,明确 x 在各个时刻的值。由于不能确定 B 的 W(写操作)在哪个时刻发生,能确定的只有一个区间,因此可以引入上下限的概念。对于 x=1,它的上下限为开始到事件“x W(2) B”,在这个范围内所有的读操作必定读到 1。对于 x=2,它的上下限为 事件“x Ok() B” 到结束,在这个范围内所有的读操作必定读到 2。那么“x W(2) B”到“x Ok() B”这段范围,x 的值是什么?1 或者 2。由此可以将 x 分为三个阶段,各阶段"最新"的值如下图所示:
清楚了 x 的变化后理解例子中 A C D 的读到结果就很容易了。
最后返回的 D 读到了 1,看起来是 “stale read”,其实并不是,它仍满足线性一致性。D 请求横跨了三个阶段,而读可能发生在任意时刻,所以 1 或 2 都行。同理,A 读到的值也可以是 2。C 就不太一样了,C 只有读到了 2 才能满足线性一致。因为 “x R() C” 发生在 “x Ok() B” 之后(happen before [3]),可以推出 R 发生在 W 之后,那么 R 一定得读到 W 完成之后的结果:2。
一句话概括:在分布式系统上实现寄存器语义。
实现线性一致
如开头所说,一个分布式系统正确实现了共识算法并不意味着能线性一致。共识算法只能保证多个节点对某个对象的状态是一致的,以 Raft 为例,它只能保证不同节点对 Raft Log(以下简称 Log)能达成一致。那么 Log 后面的状态机(state machine)的一致性呢?并没有做详细规定,用户可以自由实现。
Raft
Raft 是一个强 Leader 的共识算法,只有 Leader 能处理客户端的请求,集群的数据(Log)的流向是从 Leader 流向 Follower。其他的细节在这就不赘述了,网上有很多资料 [4]。
In Practice
以 TiKV 为例,TiKV 内部可分成多个模块,Raft 模块,RocksDB 模块,两者通过 Log 进行交互,整体架构如下图所示,consensus 就是 Raft 模块,state machine 就是 RocksDB 模块。
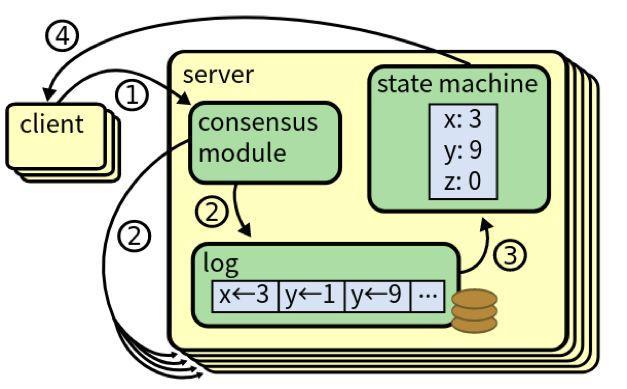
Client 将请求发送到 Leader 后,Leader 将请求作为一个 Proposal 通过 Raft 复制到自身以及 Follower 的 Log 中,然后将其 commit。TiKV 将 commit 的 Log 应用到 RocksDB 上,由于 Input(即 Log)都一样,可推出各个 TiKV 的状态机(即 RocksDB)的状态能达成一致。但实际多个 TiKV 不能保证同时将某一个 Log 应用到 RocksDB 上,也就是说各个节点不能实时一致,加之 Leader 会在不同节点之间切换,所以 Leader 的状态机也不总有最新的状态。Leader 处理请求时稍有不慎,没有在最新的状态上进行,这会导致整个系统违反线性一致性。好在有一个很简单的解决方法:依次应用 Log,将应用后的结果返回给 Client。
这方法不仅简单还通用,读写请求都可以这样实现。这个方法依据 commit index 对所有请求都做了排序,使得每个请求都能反映出状态机在执行完前一请求后的状态,可以认为 commit 决定了 R/W 事件发生的顺序。Log 是严格全序的(total order),那么自然所有 R/W 也是全序的,将这些 R/W 操作一个一个应用到状态机,所得的结果必定符合线性一致性。这个方法的缺点很明显,性能差,因为所有请求在 Log 那边就被序列化了,无法并发的操作状态机。
这样的读简称 LogRead。由于读请求不改变状态机,这个实现就显得有些“重“,不仅有 RPC 开销,还有写 Log 开销。优化的方法大致有两种:
-
ReadIndex
-
LeaseRead
ReadIndex
相比于 LogRead,ReadIndex 跳过了 Log,节省了磁盘开销,它能大幅提升读的吞吐,减小延时(但不显著)。Leader 执行 ReadIndex 大致的流程如下:
-
记录当前的 commit index,称为 ReadIndex
-
向 Follower 发起一次心跳,如果大多数节点回复了,那就能确定现在仍然是 Leader
-
等待状态机至少应用到 ReadIndex 记录的 Log
-
执行读请求,将结果返回给 Client
第 3 点中的“至少”是关键要求,它表明状态机应用到 ReadIndex 之后的状态都能使这个请求满足线性一致,不管过了多久,也不管 Leader 有没有飘走。为什么在 ReadIndex 只有就满足了线性一致性呢?之前 LogRead 的读发生点是 commit index,这个点能使 LogRead 满足线性一致,那显然发生这个点之后的 ReadIndex 也能满足。
LeaseRead
LeaseRead 与 ReadIndex 类似,但更进一步,不仅省去了 Log,还省去了网络交互。它可以大幅提升读的吞吐也能显著降低延时。基本的思路是 Leader 取一个比 Election Timeout 小的租期,在租期不会发生选举,确保 Leader 不会变,所以可以跳过 ReadIndex 的第二步,也就降低了延时。 LeaseRead 的正确性和时间挂钩,因此时间的实现至关重要,如果漂移严重,这套机制就会有问题。
Wait Free
到此为止 Lease 省去了 ReadIndex 的第二步,实际能再进一步,省去第 3 步。这样的 LeaseRead 在收到请求后会立刻进行读请求,不取 commit index 也不等状态机。由于 Raft 的强 Leader 特性,在租期内的 Client 收到的 Resp 由 Leader 的状态机产生,所以只要状态机满足线性一致,那么在 Lease 内,不管何时发生读都能满足线性一致性。有一点需要注意,只有在 Leader 的状态机应用了当前 term 的第一个 Log 后才能进行 LeaseRead。因为新选举产生的 Leader,它虽然有全部 committed Log,但它的状态机可能落后于之前的 Leader,状态机应用到当前 term 的 Log 就保证了新 Leader 的状态机一定新于旧 Leader,之后肯定不会出现 stale read。
写在最后
本文粗略地聊了聊线性一致性,以及 TiKV 内部的一些优化。最后留四个问题以便更好地理解本文:
-
对于线性一致中的例子,如果 A 读到了 2,那么 x 的各个阶段是怎样的呢?
-
对于下图,它符合线性一致吗?(温馨提示:请使用游标卡尺。;-P)
-
Leader 的状态机在什么时候没有最新状态?要线性一致性,Raft 该如何解决这问题?
-
FollowerRead 可以由 ReadIndex 实现,那么能由 LeaseRead 实现吗?
如有疑问或想交流,欢迎联系我:shentaining@pingcap.com
[0].Ongaro, Diego. Consensus: Bridging theory and practice. Diss. Stanford University, 2014.
[1].Herlihy, Maurice P., and Jeannette M. Wing. "Linearizability: A correctness condition for concurrent objects." ACM Transactions on Programming Languages and Systems (TOPLAS) 12.3 (1990): 463-492.
[2].Gilbert, Seth, and Nancy Lynch. "Brewer's conjecture and the feasibility of consistent, available, partition-tolerant web services." Acm Sigact News 33.2 (2002): 51-59.
[3].Lamport, Leslie. "Time, clocks, and the ordering of events in a distributed system." Communications of the ACM 21.7 (1978): 558-565.
目录